Abhinav Diddee

ECE @ Northeastern
A catalogue of some of my projects
View My LinkedIn Profile
Projects I’ve Built!
Highlights
BarkPak
We built a backpack for dogs to map out search and rescue environments, and put a lidar/camera/other sensors on it. Aka we strapped a lidar to a cute dog!

CarNanny
Created an end-to-end system to detect babies/pets left in vehicles, and send text alerts to owners if vehicle conditions exceed safe thresholds of CO2 or temperature. Used a Jetson Nano, webcam, and NDIR CO2/Temperature sensor. Won 3rd place out of 200 projects at HackMIT 2022

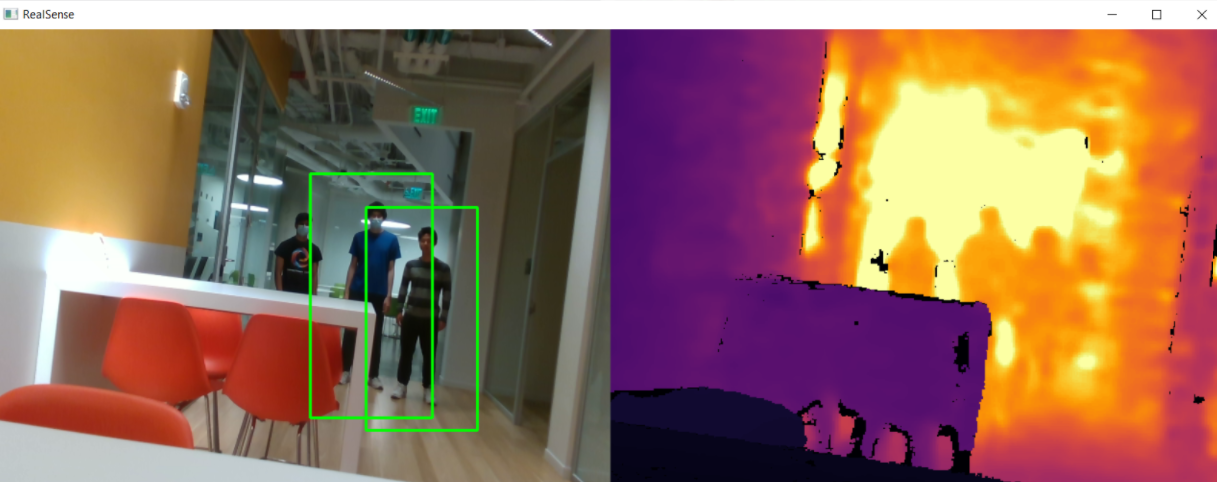
Spotlight
I built a system to track people in 3d space and adjust lighting in a room to save energy. We ended up winning 3rd place at HackHarvard 2021
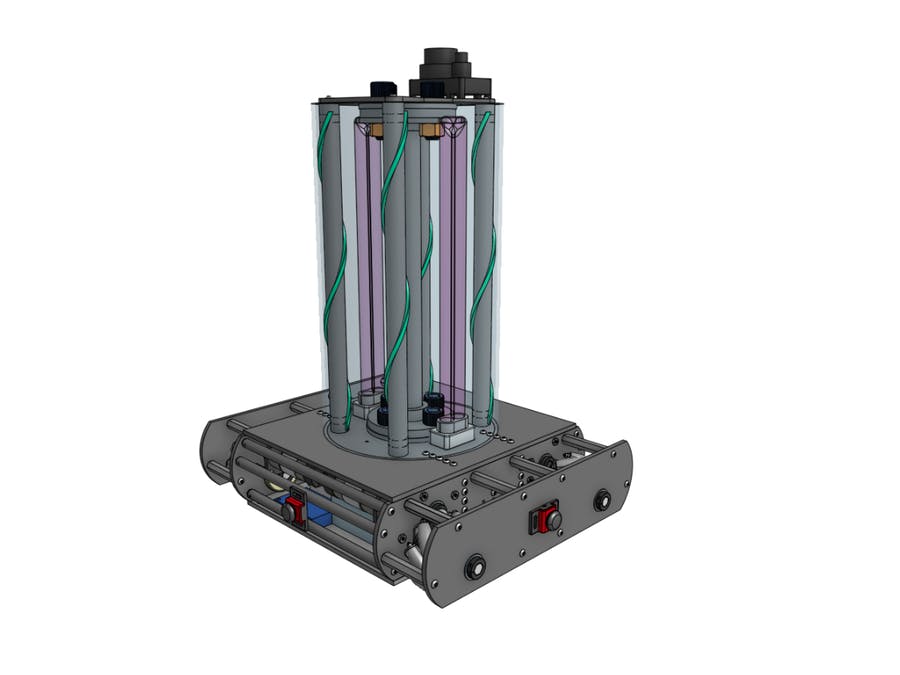
UV Disinfection Robot
I designed and wrote visualization code for a robot concept to disinfect indoor spaces during the initial wave of the COVID-19 Pandemic
Watney Mark 3 // Northeastern Mars Rover Team
I helped build electrical systems for a rover competing in the University Rover Challenge to complete manipulation tasks and detect life on mars!

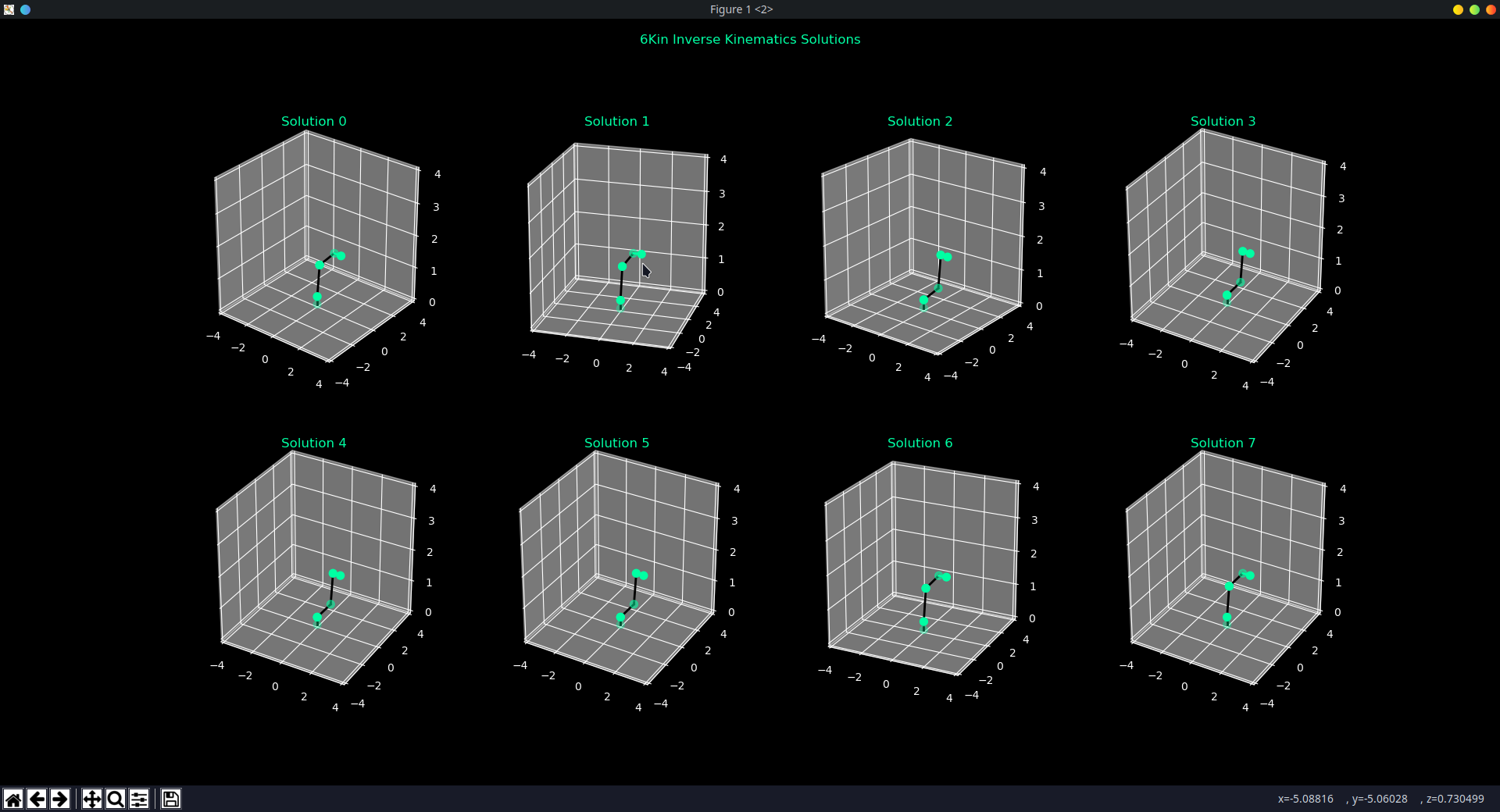
6Kin – Inverse Kinematics for a 6-DOF Arm
I built an analytical inverse kinematics solver for a 6-DOF robotic arm!
Other Projects!
PARIS – Northeastern University’s Submission for the DOE E-Robot Challenge
I’m part of a team to build a robot to seal insulation in old buildings and prevent heat leakage. I worked on miscellaneous tasks (mostly software and electrical oriented)
 —
—
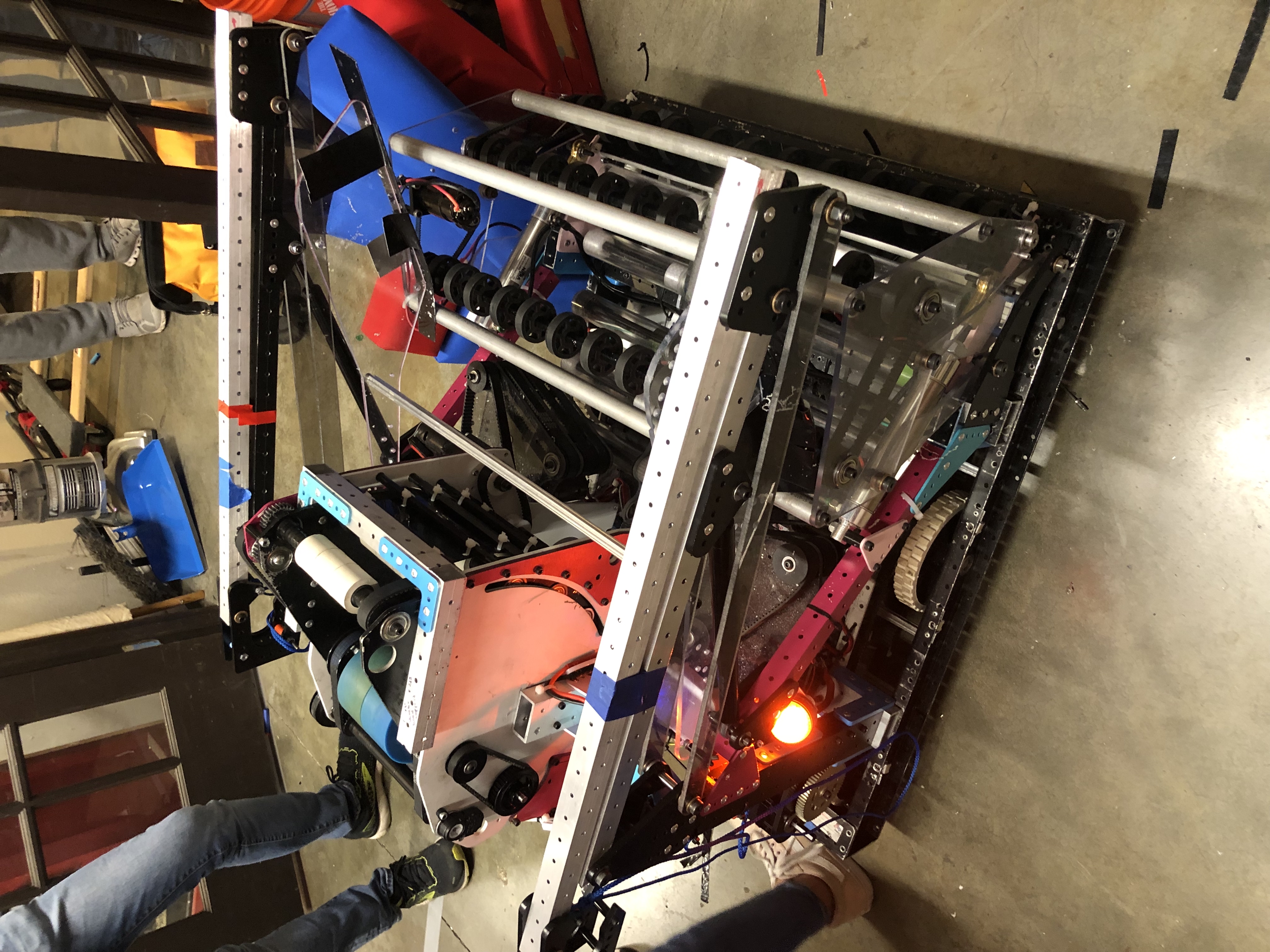
FIRST Robotics
I founded and led a team in high school for 3 years to design, build, program and iterate 150lb robots to complete a series of challenges in 6 weeks at the beginning of each year. These challenges ranged from placing circular disks precisely on walls to launching balls into a goal 8ft high from 20 feet away. I led the team to the world championships our rookie year, winning over 6 awards throughout my time as Captain. I also worked on a few miscellaneous CAD projects for various challenges. Here are some of the robots I designed & built!
Unagi // FRC 2020-21 (Launching dodgeballs)
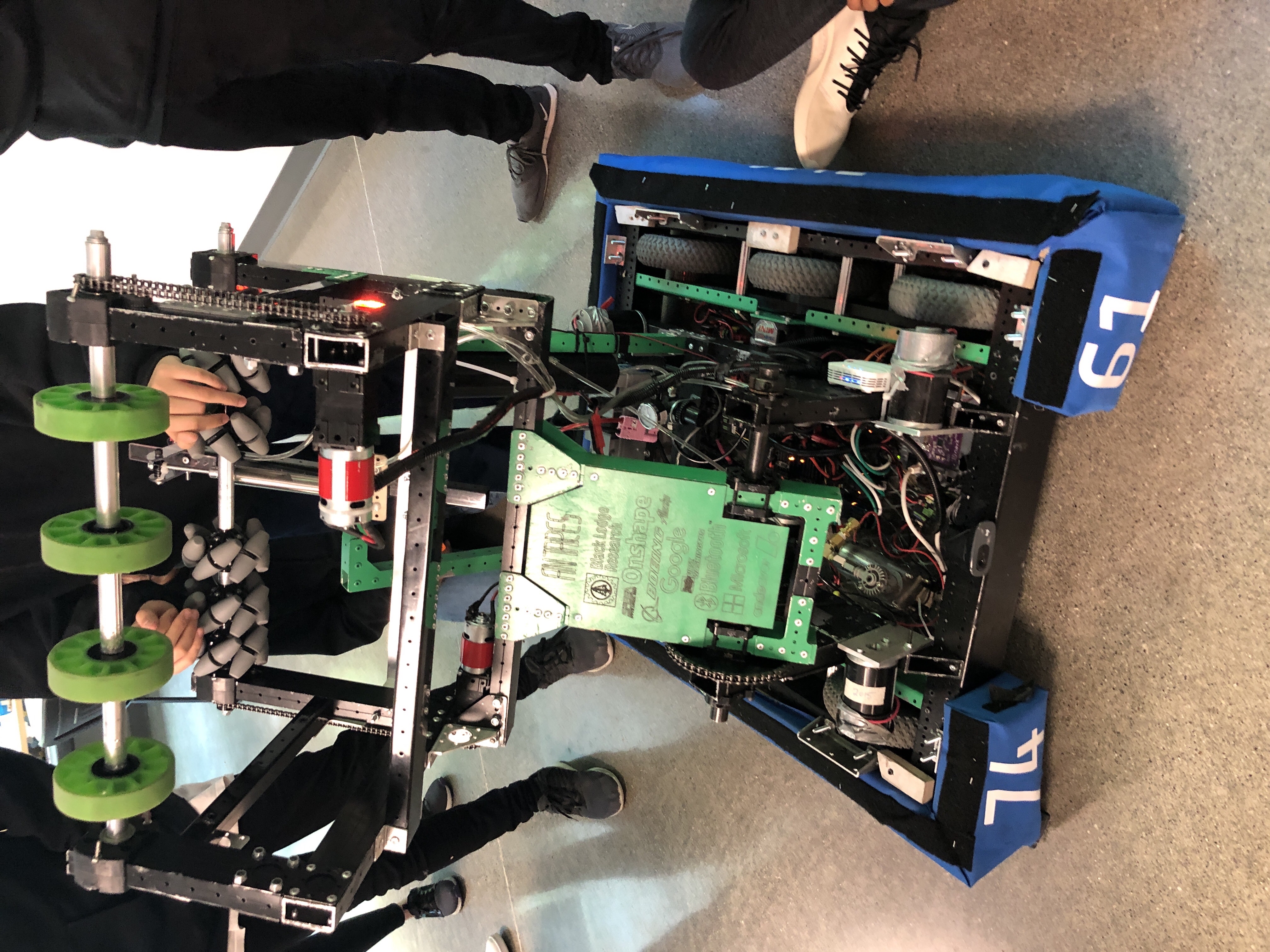
 Isopod // FRC 2020-21
Isopod // FRC 2020-21
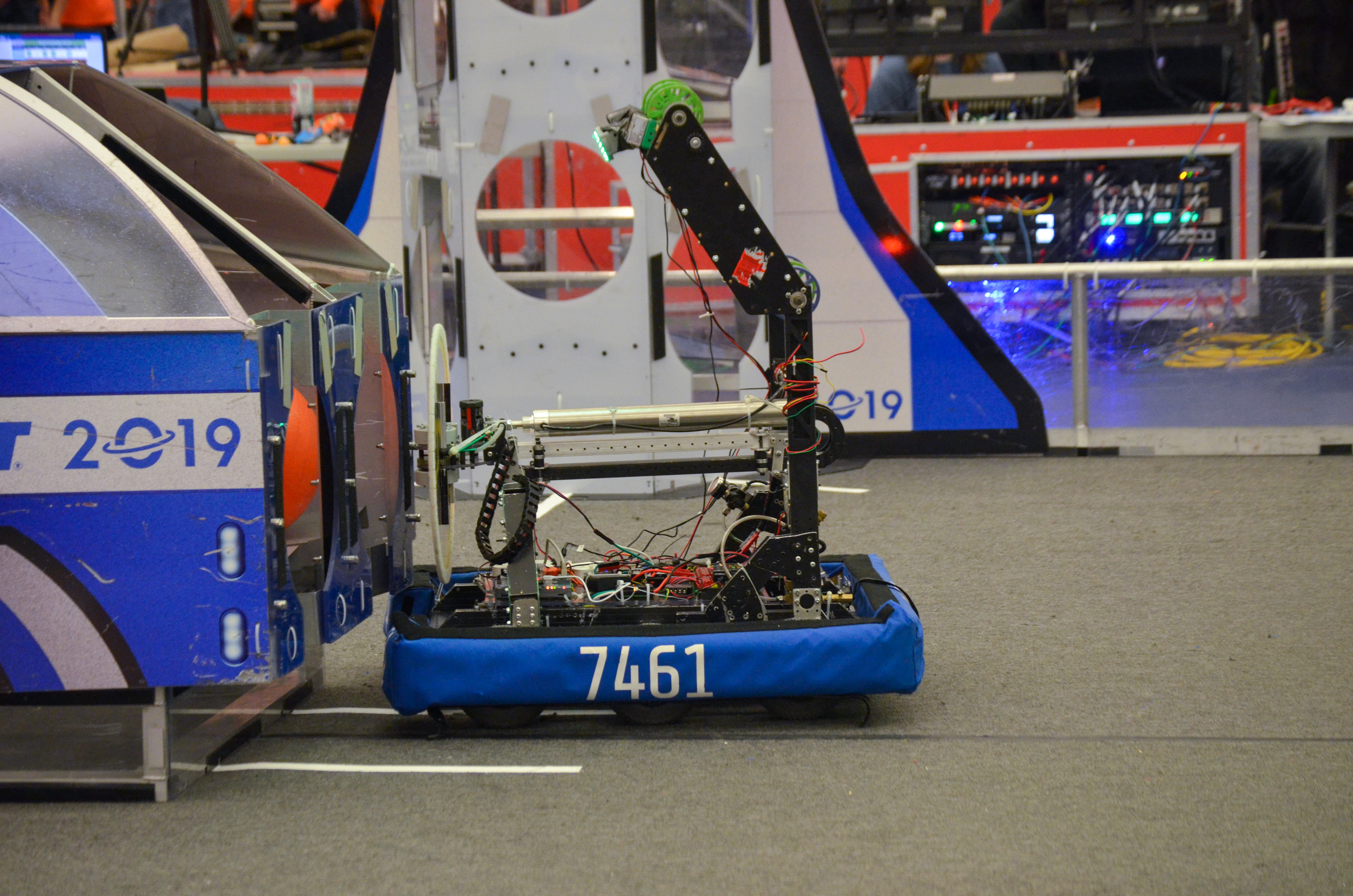
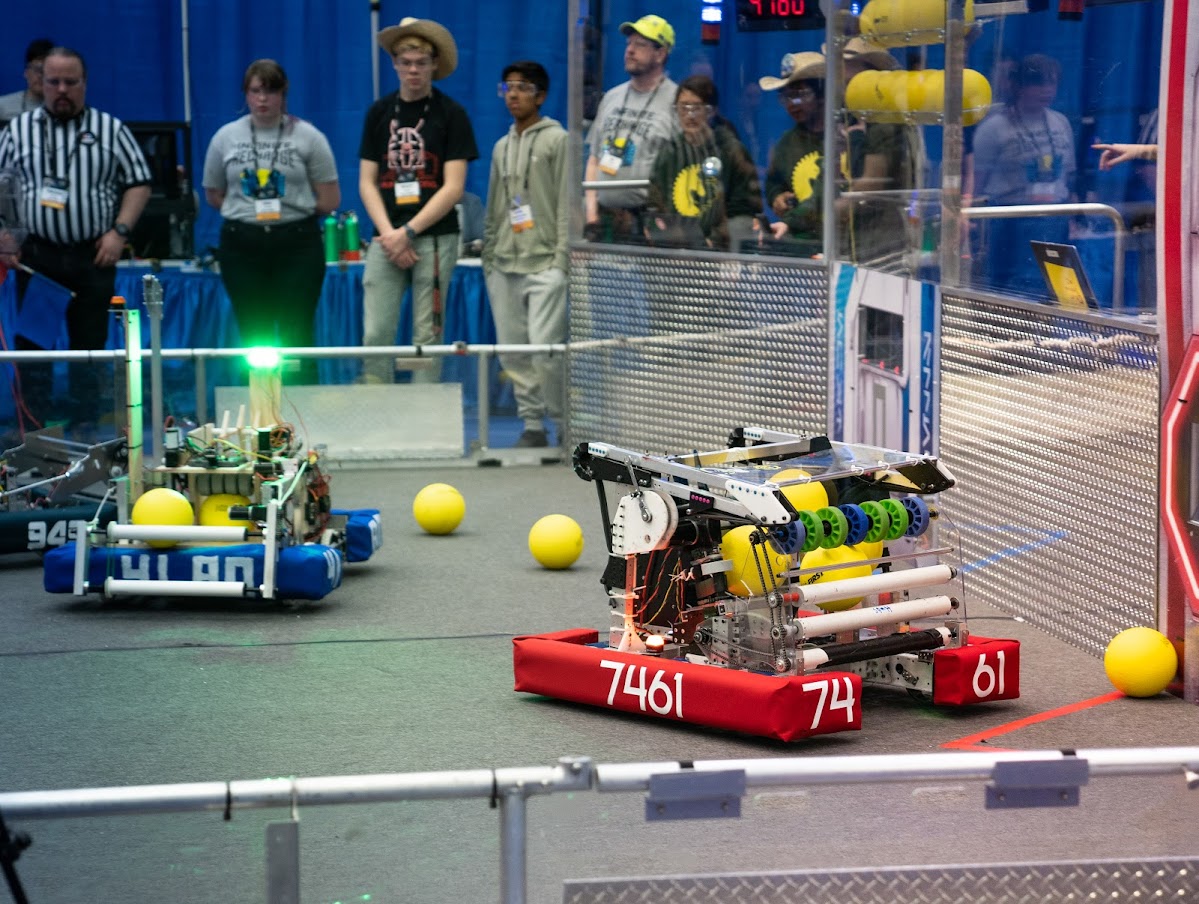 Doggo // FRC 2019 (Placing disks on walls and placing kickballs in slots)
Doggo // FRC 2019 (Placing disks on walls and placing kickballs in slots)
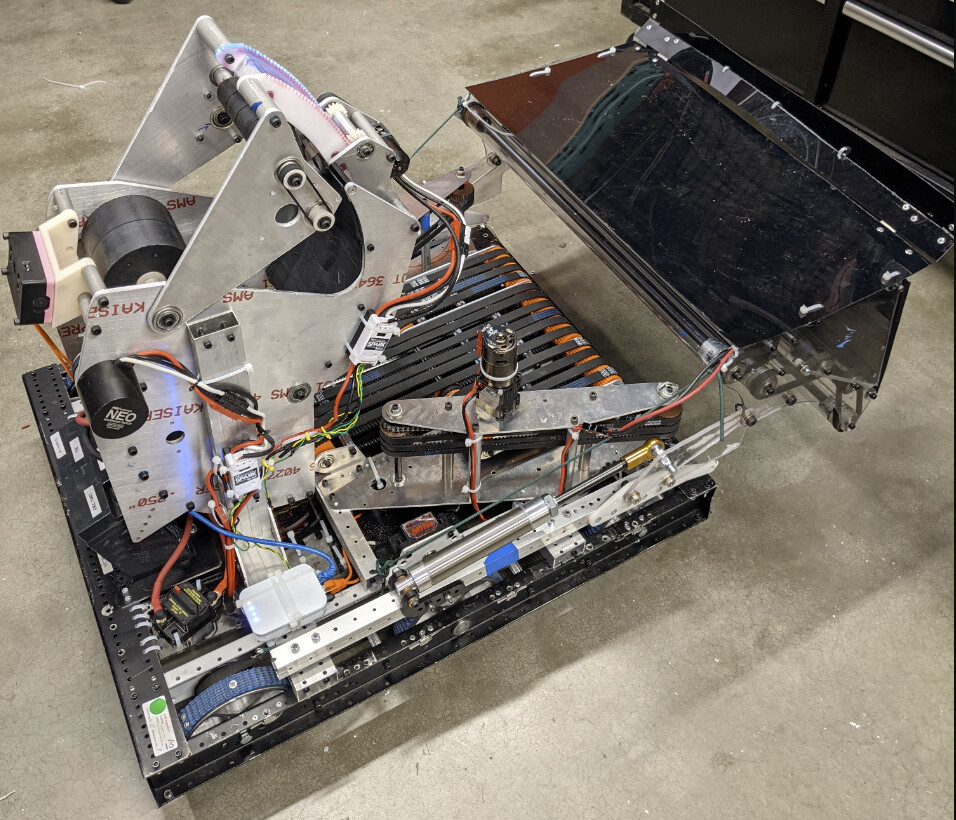
 Antares // FRC 2019
Antares // FRC 2019
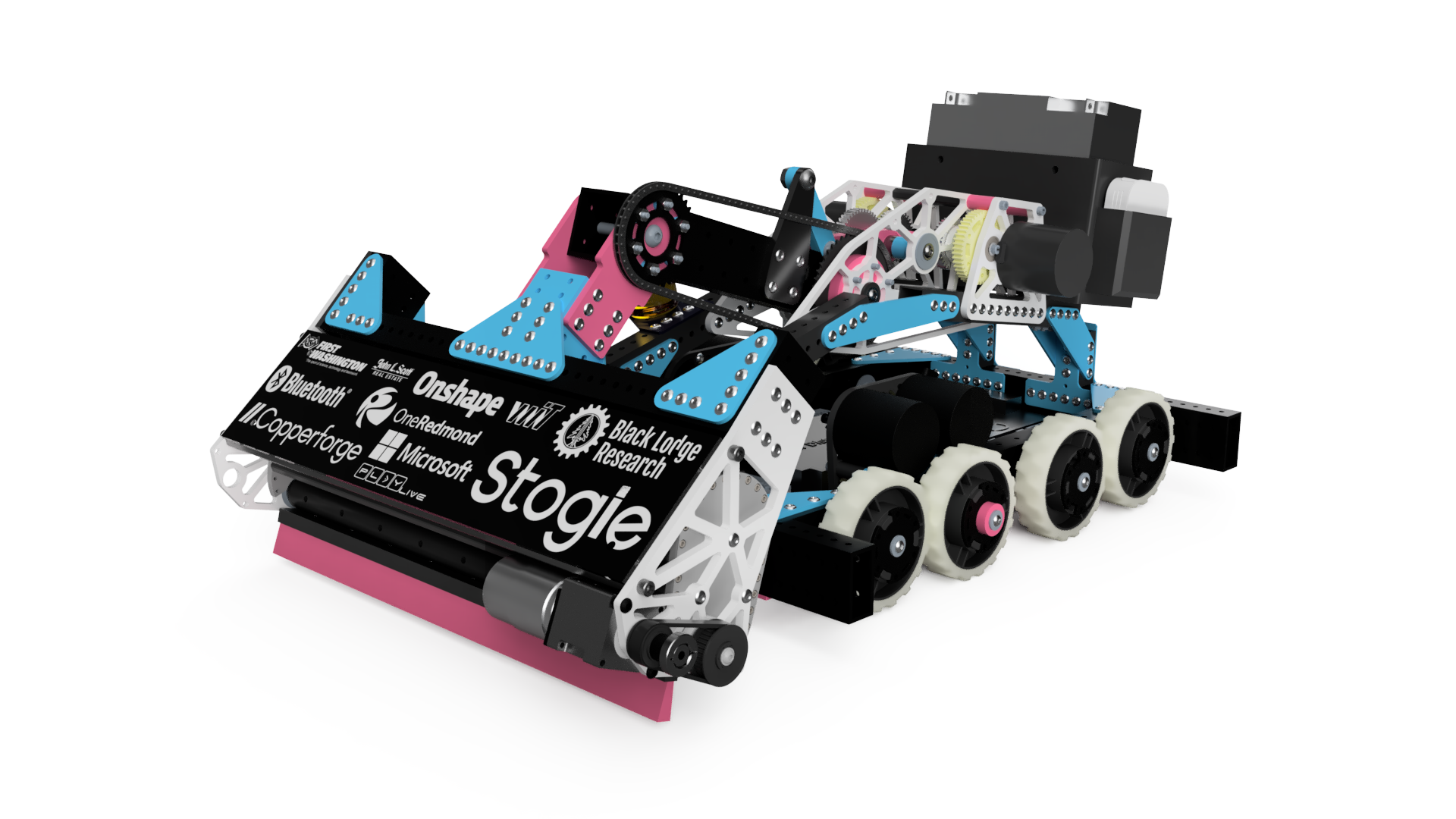
 Stogie // CAD Challenge: Picking up cigarettes from streets
Stogie // CAD Challenge: Picking up cigarettes from streets
 Quake // CAD Challenge: Launching footballs and lifting weights
Quake // CAD Challenge: Launching footballs and lifting weights
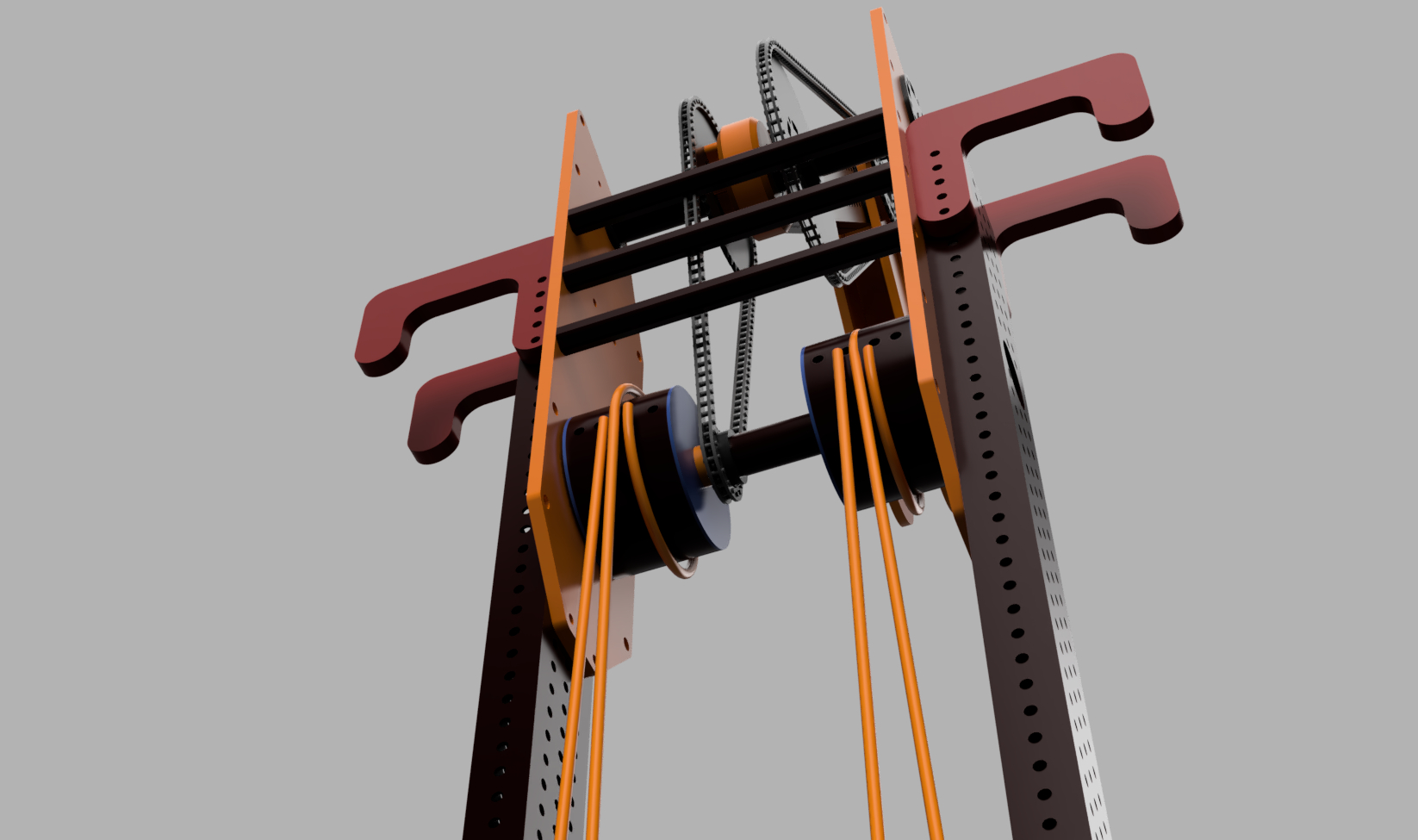
 Differential Elevator // CAD Challenge: Knocking Yoga Balls off of Trusses
Uses two motors and cable rigging to power both linear motion and end effector rotation with both motors
Differential Elevator // CAD Challenge: Knocking Yoga Balls off of Trusses
Uses two motors and cable rigging to power both linear motion and end effector rotation with both motors
Organizations I’m a part of
- IDEA: Northeastern University’s Venture Accelerator
- Northeastern University Mars Rover Team
- Northeastern University RiVER Lab
- College Ventures Network
Page template forked from evanca